MATLAB/Simulink
倒立振子制御モデル
概 要
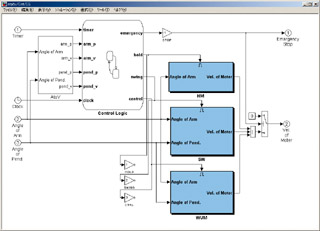
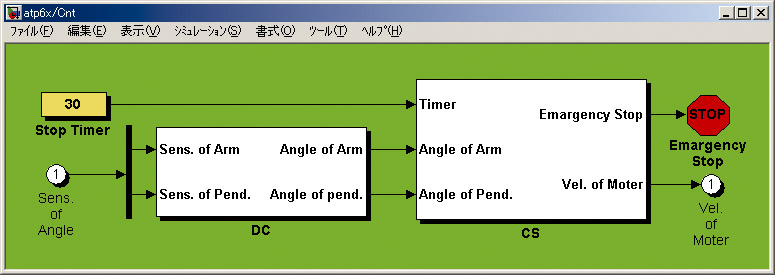
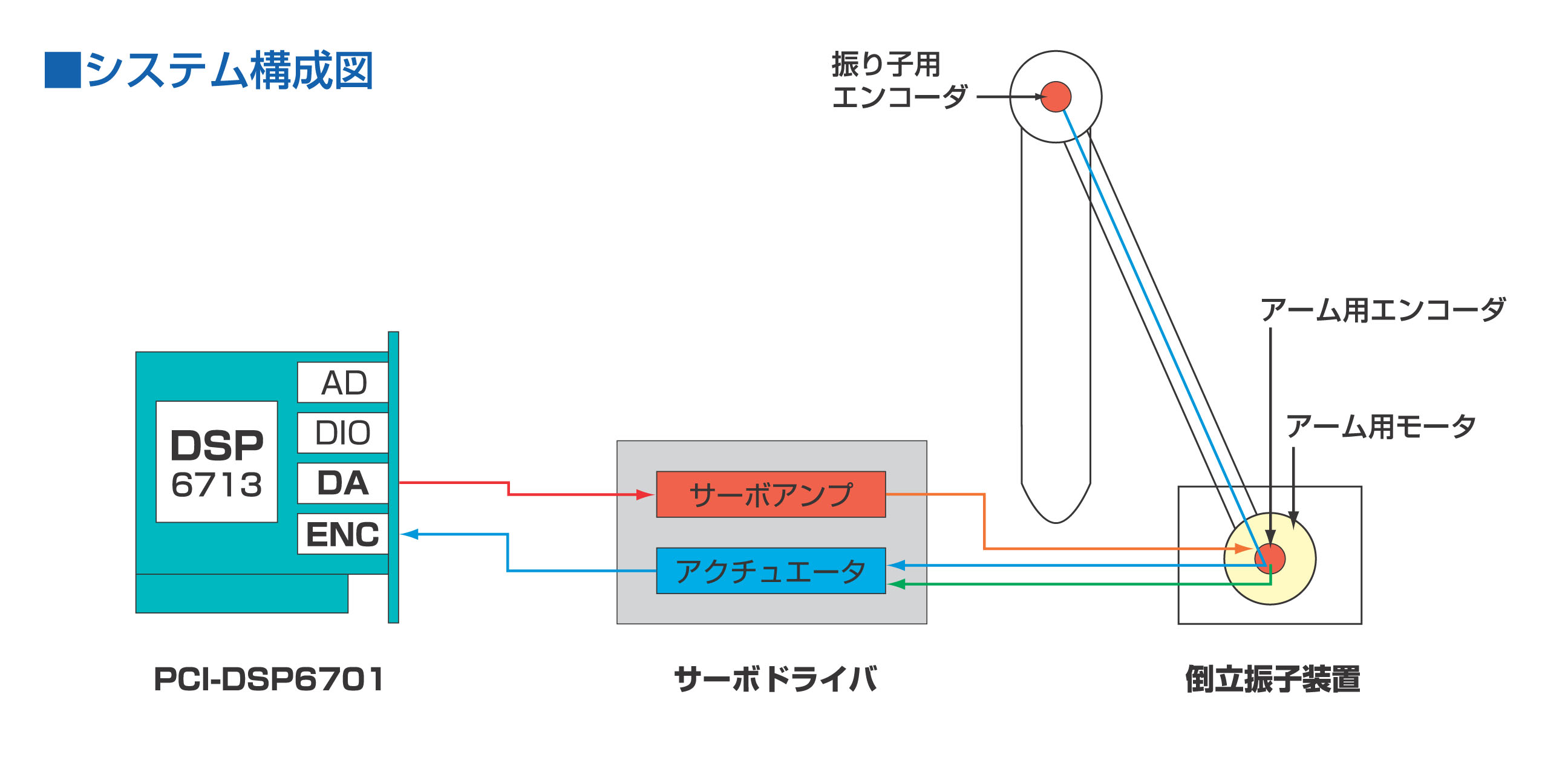
倒立振子制御モデルは、アーム、振り子の状態をエンコーダにて計測し、制御演算後、
アームのモータを電圧でコントロールすることによって、LQG制御を行います。
LQG制御はとは、現代制御理論の枠組みで開発された設計手法であり、最適レギュレー
タによる状態フィードバック安定化コントロールの設計理論と、カルマンフィルタによ
る状態推定理論とを組み合わせたものです。
DSPボードに搭載しているフラッシュメモリに記録し、ホストプロセッサを不要とした
システムとなっています。
|
|
 |